SAMUELE POZZANI
MY PROJECTS
EMBEDDED TUNER
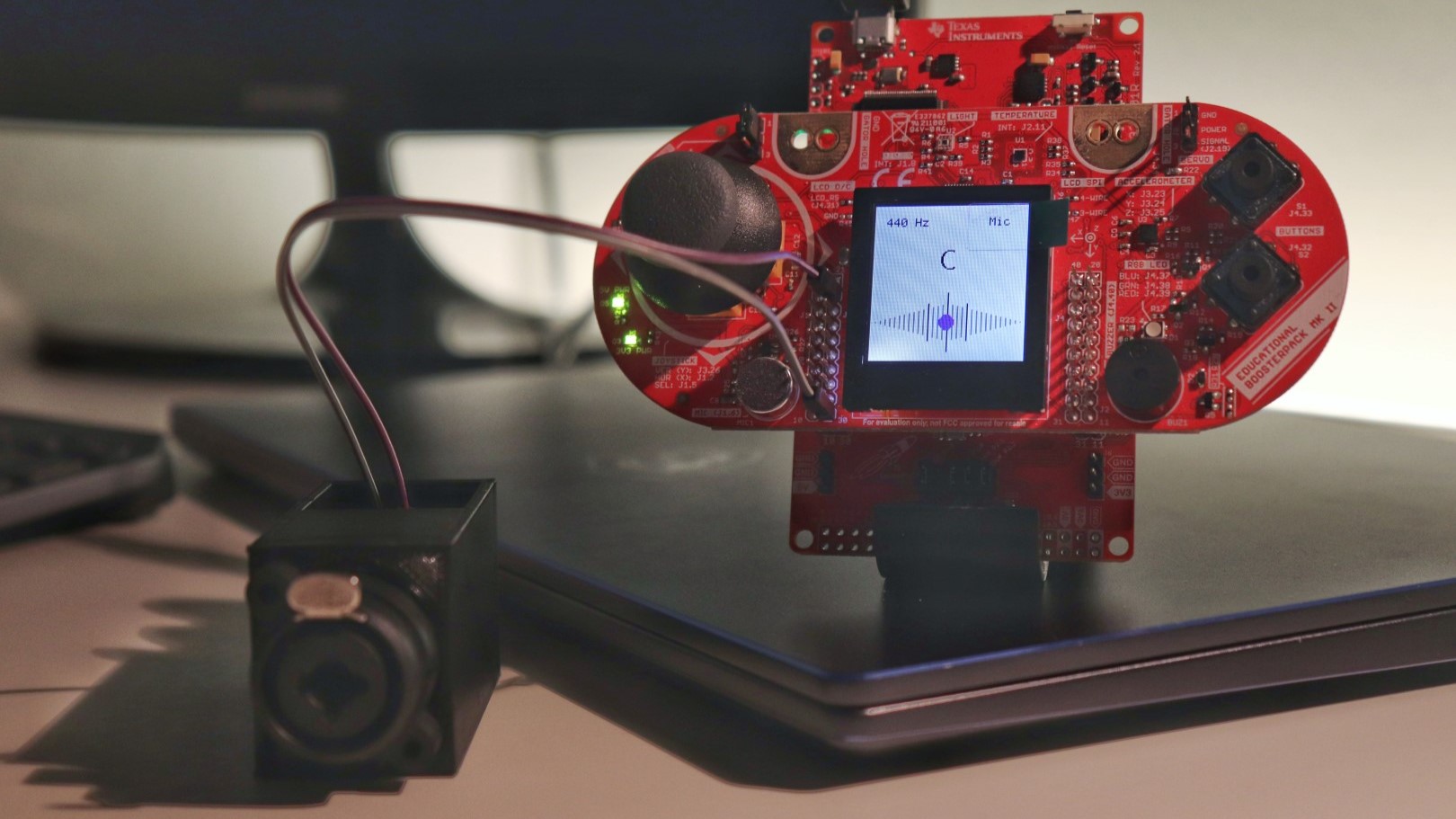
Embedded Tuner is a musical tuner which can be used to tune any kind of acoustic or electric musical instruments. It analyzes the audio signal from the microphone or the input jack, detects the pitch and shows the corresponding note on the display. It can also play any desired note with the buzzer to check the intonation by ear.
The project was developed for the course Embedded Software for the Internet of Things at the University of Trento. The software is written in C and is compatible with the Texas Instruments MSP432 microcontroller.
More info on GitHub.
The project was developed for the course Embedded Software for the Internet of Things at the University of Trento. The software is written in C and is compatible with the Texas Instruments MSP432 microcontroller.
More info on GitHub.
ROBOTICS PROJECT
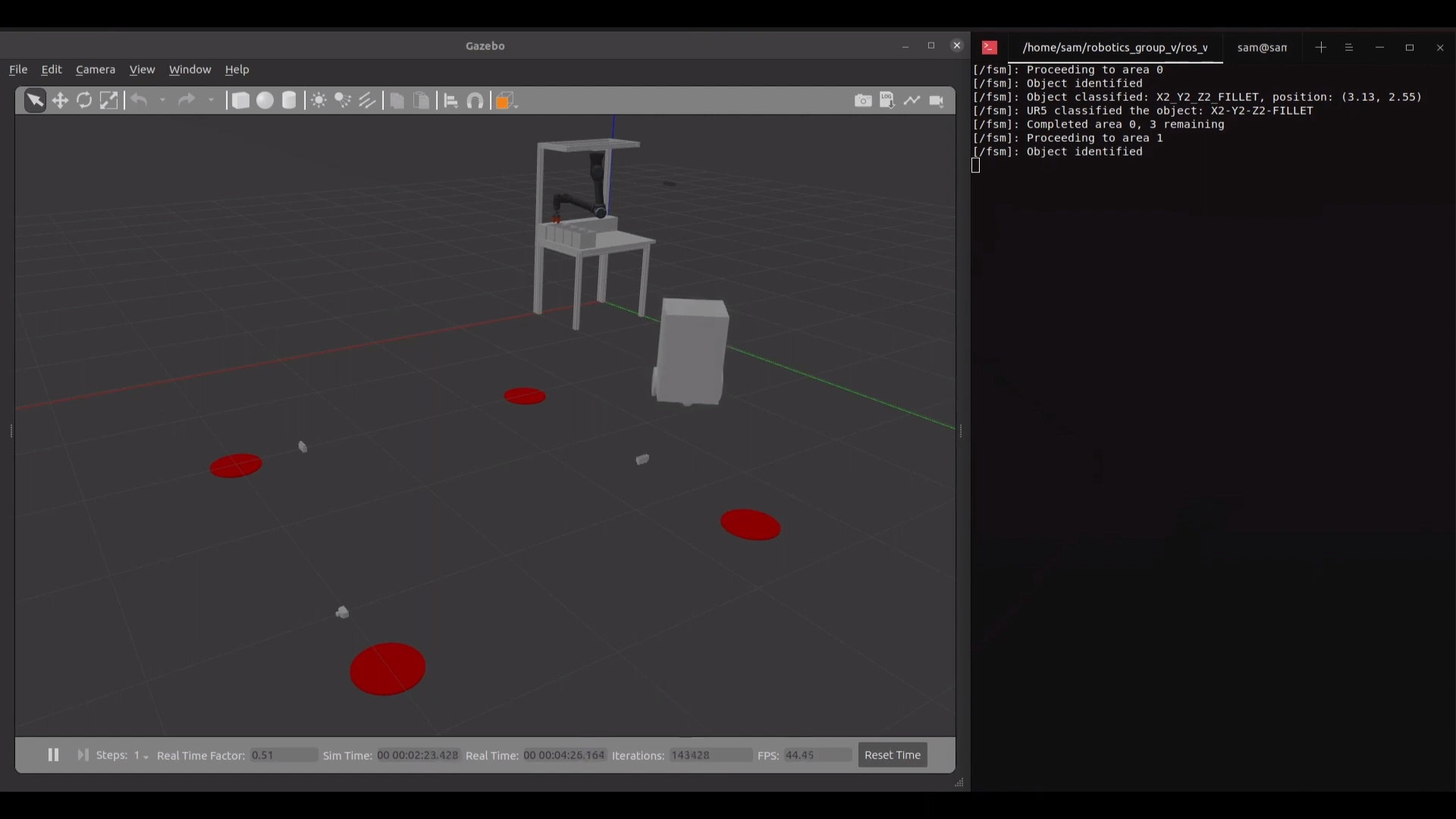
A mobile robot equipped with a 3D camera moves in a room with four circular areas, and it has to localise and classify four objects which are positioned inside every area. A robotic arm with 6-DoF picks up the object and places it in a basket according to its class.
The project was developed for the course Fundamentals of Robotics at the University of Trento. The software is written in C++ and Python and it is based on the ROS middleware to enable communication and parallelism between nodes. The computer vision part for image recognition works on the YOLOv5 model.
More info on GitHub.
The project was developed for the course Fundamentals of Robotics at the University of Trento. The software is written in C++ and Python and it is based on the ROS middleware to enable communication and parallelism between nodes. The computer vision part for image recognition works on the YOLOv5 model.
More info on GitHub.
AUTOMATED NETWORK SLICE OPTIMIZATION - SDN
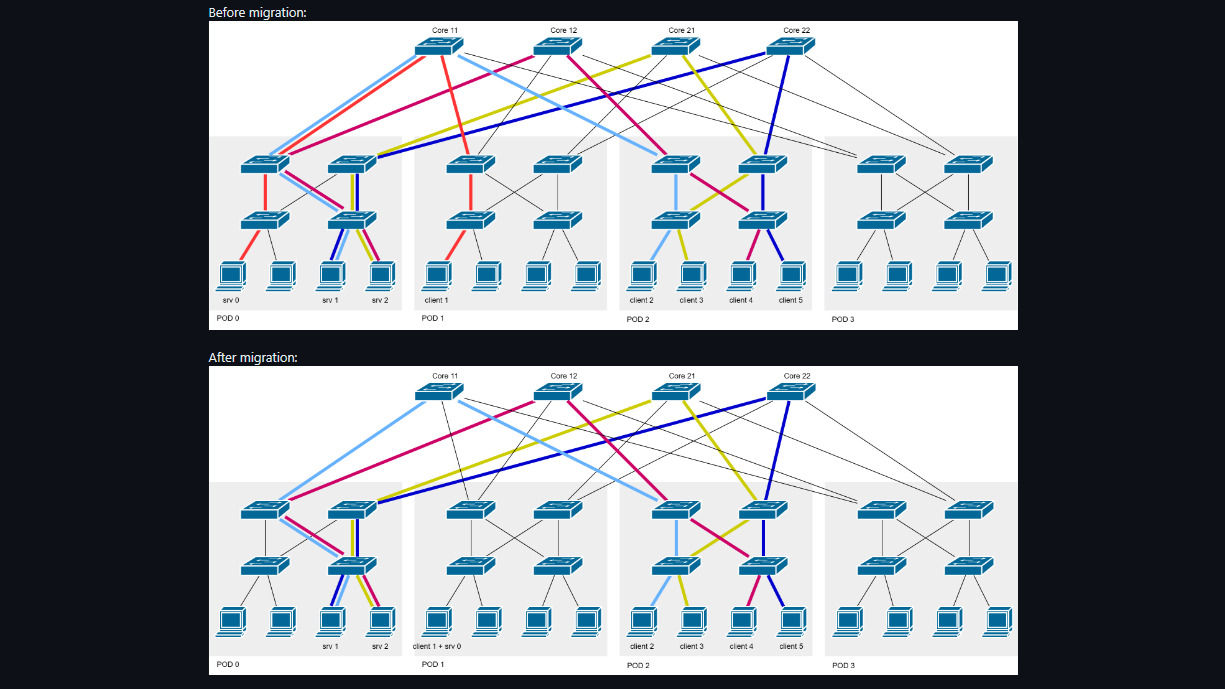
A RYU-based SDN controller written in Python slices the network, dynamically re-allocates services, and schedules new routes in order to maintain the desired QoS. The simulation is based on Mininet, a realistic virtual network running real kernel, switch and application code on a Comnetsemu Virtual Machine. The case study refers to a modern datacenter network topology called Fat-Tree as described in the research article "A scalable, commodity data center network architecture" (Mohammad Al-Fares et al., 2008).
The project was developed for the course Softwarized and Virtualized Mobile Networks at the University of Trento.
More info on GitHub.
The project was developed for the course Softwarized and Virtualized Mobile Networks at the University of Trento.
More info on GitHub.
AGENT DASHBOARD
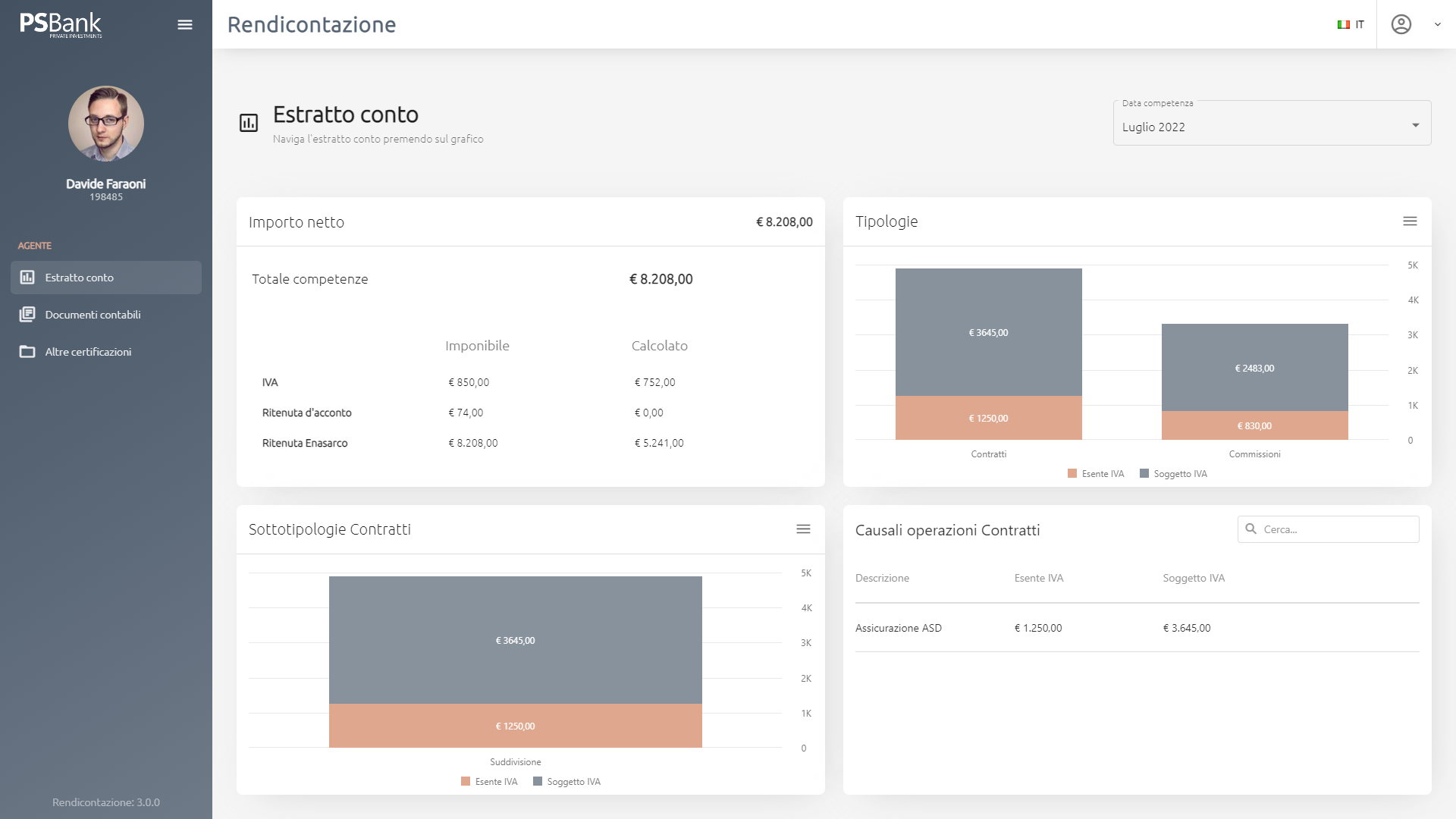
"Rendicontazione" is a web application thought for internal management of bank agents. It consists of a clean dashboard interface where the client can find a summary of the data generated by electronic invoices for every agent in the company.
I designed the UI with Adobe XD and developed the application using Angular framework. The data is retrieved from a Web API with RESTful communication.
I designed the UI with Adobe XD and developed the application using Angular framework. The data is retrieved from a Web API with RESTful communication.
MARCONI WEBSERVER
"Marconi Webserver" is a web application which collects all the online services of the technical high school "G. Marconi" in Verona, Italy. Professors, students and staff members can log in on the webserver and access a lot of features such as the lessons timetable with a customized and aesthetic user experience. I worked with a special team of four students during 2020 summer holidays.
We developed the application frontend with Angular framework which connects to a Web API written in Python (Flask) for the backend operations.
We developed the application frontend with Angular framework which connects to a Web API written in Python (Flask) for the backend operations.

CAD EAT
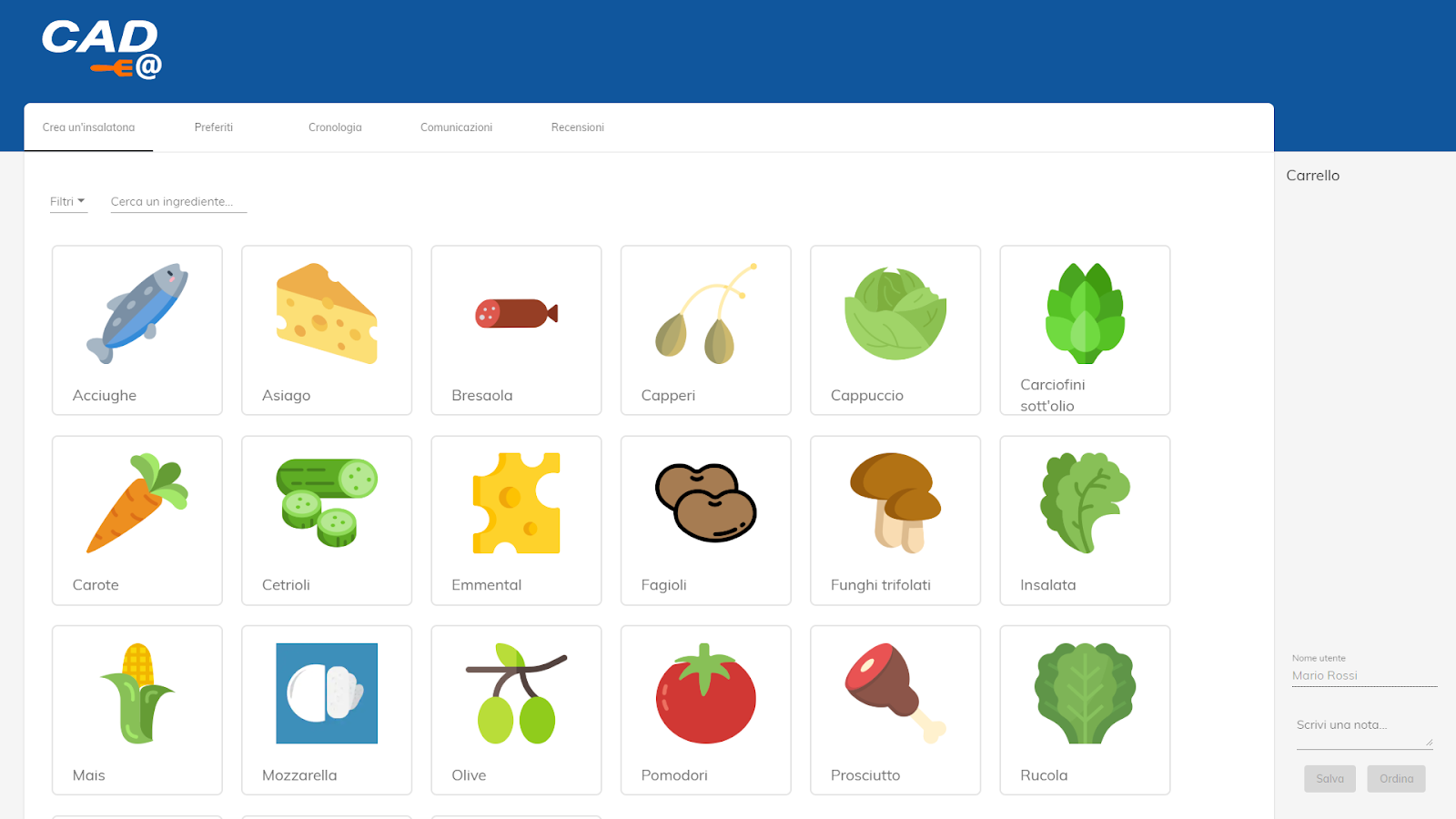
"CAD EAT" is the project I worked on during a three-month school internship in a team with another student. It allows employees to order a salad from the company canteen with custom ingredients. We went through all the design process by interviewing the clients and proposing them different features.
The application frontend works on Angular framework which communicates with a Web API backend developed using ASP.NET. We also designed the relational database which runs on Microsoft SQL Server.
The application frontend works on Angular framework which communicates with a Web API backend developed using ASP.NET. We also designed the relational database which runs on Microsoft SQL Server.